今天分享的是:2025人形『机器人』️灵巧手深度报告:灵巧手赛道蓝海可期,各类新技术百花齐放
报告共计:44页
人形『机器人』️灵巧手赛道蓄势待发,技术革新驱动产业新机遇
随着人工智能与『机器人』️技术的深度融合,人形『机器人』️正逐步从实验室走向现实应用,而作为其实现精细操作与环境交互的核心部件——灵巧手,已成为行业关注的焦点。近期发布的深度报告指出,灵巧手技术正处于快速演进阶段,各类创新方案不断涌现,未来市场潜力巨大,有望成为『机器人』️领域的一片新蓝海。
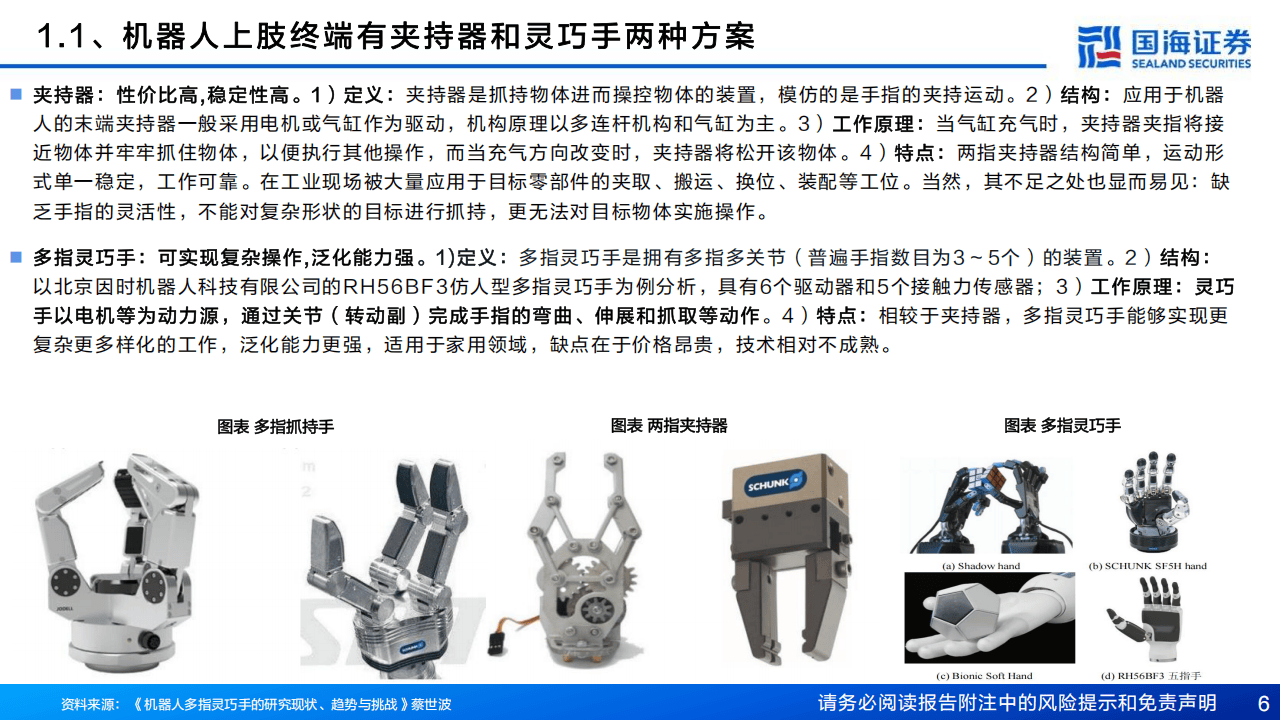
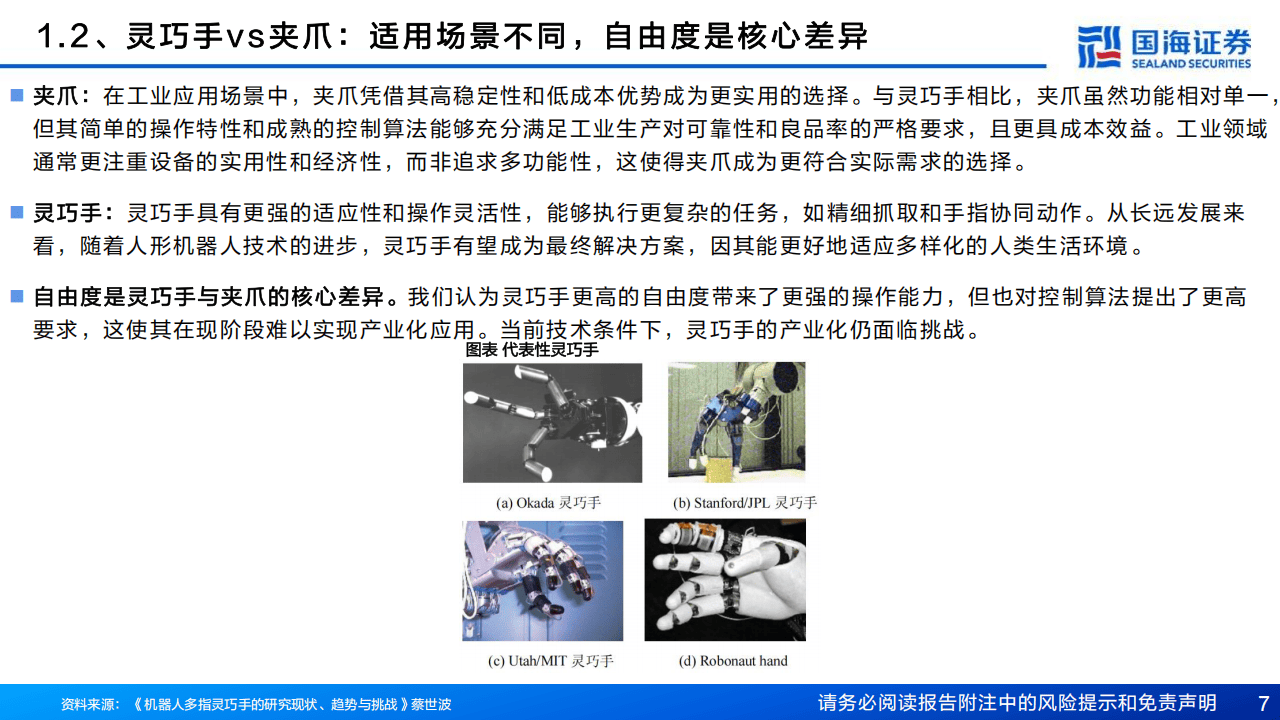
与传统的工业夹爪相比,灵巧手在自由度和任务适应性方面具有显著优势。夹爪结构简单、成本较低,适用于标准化工业场景;而灵巧手模仿人手设计,具备多指多关节结构,能够执行抓取、捏合、旋转等复杂动作,泛化能力更强,更适应家庭服务、医疗护理、物流搬运等非结构化环境。报告显示,特斯拉Optimus灵巧手的自由度已从11个提升至22个,实现“可观飞跃”,进一步推动了类人化操作的发展。
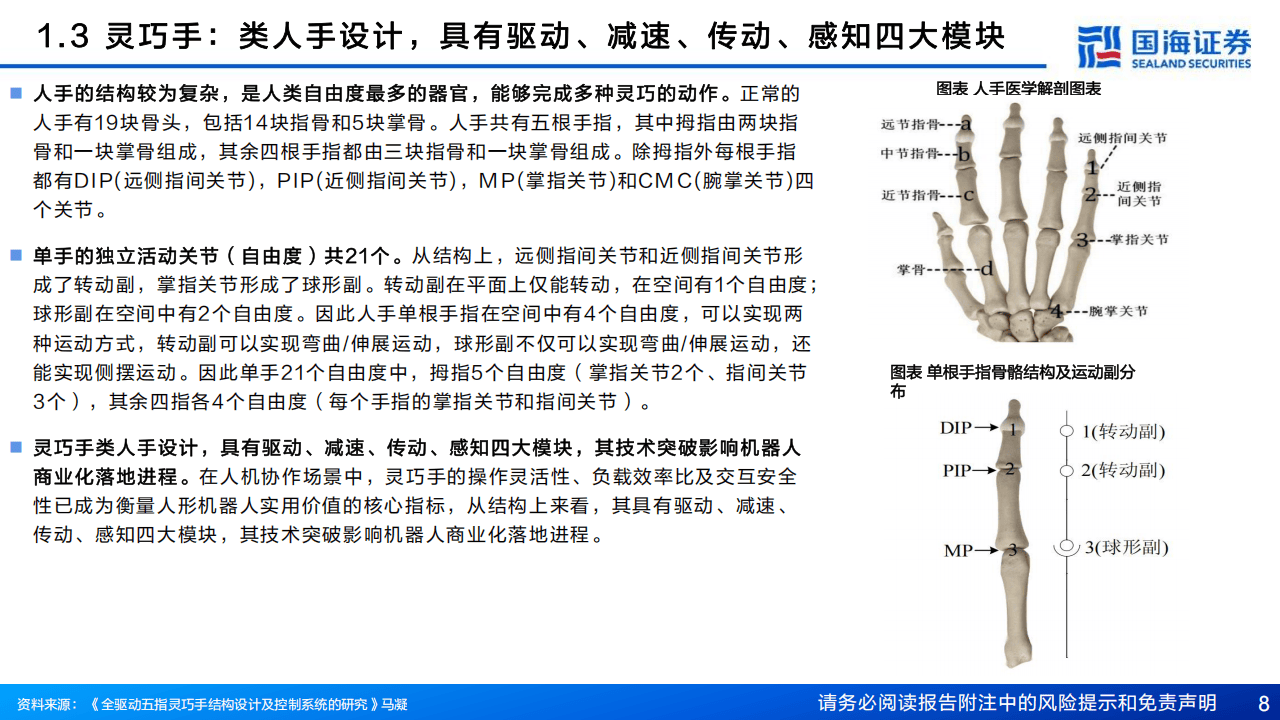
灵巧手的核心技术涵盖驱动、减速、传动和感知四大模块。驱动方面,空心杯电机因其高效率、小体积和快速响应等特点,成为主流方案,尤其适合高精度控制需求。减速模块中,谐波减速器、行星减速器等精密部件负责增大转矩,提升操作稳定性。传动方案则呈现多元化趋势,微型丝杠与腱绳组合应用日益广泛,既保证了负载能力,又兼顾了灵活性。感知层面,触觉传感器向柔性化发展,“电子皮肤”技术逐步成熟,能够实时检测外力与温度变化,赋予『机器人』️更敏锐的触觉反馈。
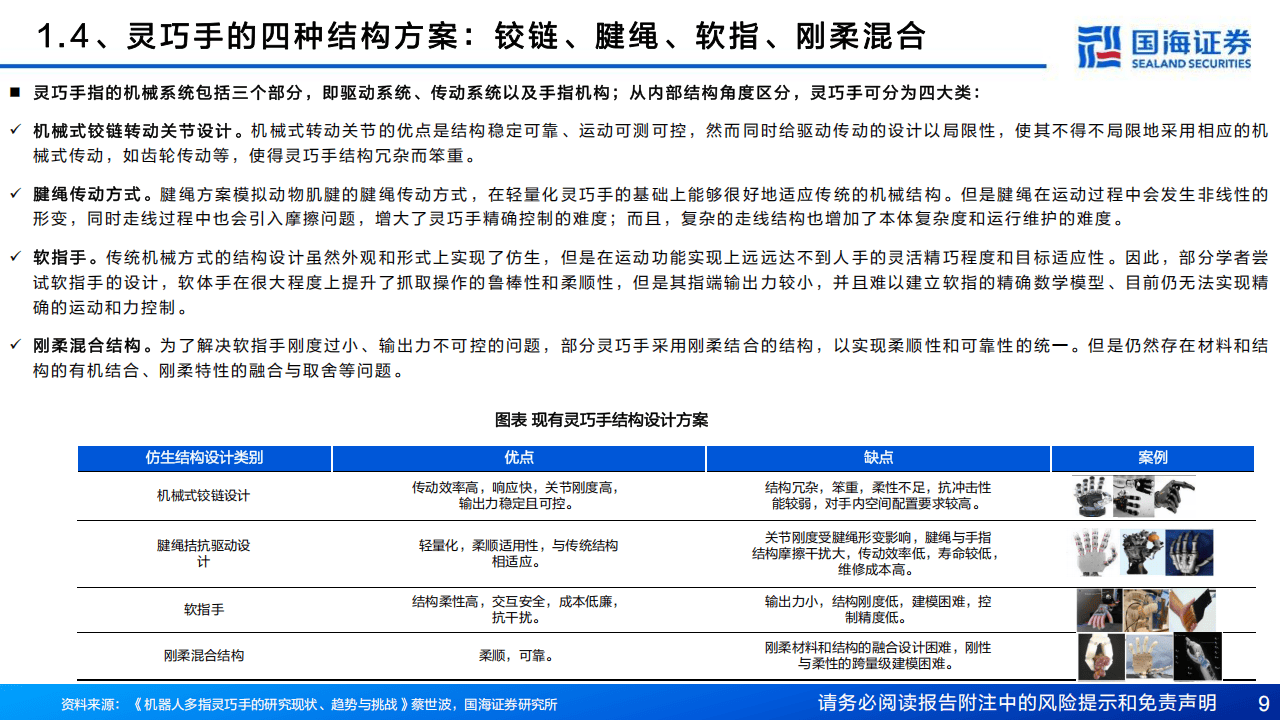
当前,灵巧手产业呈现出“百花齐放”的技术演进路径。一方面,自由度持续提升带动零部件需求增长,每增加一个主动关节,便需配套更多电机、传感器与结构件;另一方面,材料与算法创新不断突破性能边界。轻量化材料如PEEK工程塑料逐步替代金属,助力『机器人』️减重增效;端到端大模型则通过仿真训练与强化学习,显著提升灵巧手在复杂任务中的自主决策与适应能力。此外,柔性传感器与六维力矩传感器的融合应用,正推动灵巧手向“感知-决策-执行”一体化方向发展。
市场前景方面,报告预测灵巧手赛道将迎来高速增长。随着特斯拉等企业推动人形『机器人』️量产进程,灵巧手市场规模有望从2025年的9亿元攀升至2030年的376亿元,年复合增长率预计超过100%。其中,驱动与感知模块将成为价值核心,分别占据较大份额。这一趋势也吸引了三类企业积极布局:一是『机器人』️本体厂商,如星动纪元、宇树科技等,依托整机研发经验自研灵巧手;二是专注灵巧手的初创企业,如因时『机器人』️、灵巧智能,以技术专精见长;三是从零部件领域延伸入局的厂商,如兆威机电、雷赛智能,借助电机、传动件等基础能力横向拓展。
总体来看,灵巧手作为人形『机器人』️实现“手眼协调”与“智能操作”的关键环节,其技术成熟度将直接影响整个行业的商业化步伐。在多项创新技术并行发展、市场需求逐步释放的背景下,灵巧手赛道有望迎来持续扩容,并为产业链上下游企业带来新一轮发展机遇。
以下为报告节选内容


报告共计: 44页
中小未来圈,你需要的资料,我这里都有!




